



Образовање са 6 осовина или зглобна роботска рука Дии Делта или роботска рука камере
Спецификација
Оса:6
Максимална носивост: 4 кг
Поновљена локација: ±0,01 мм
корисна влажност: 20-80%
околина жалфије: 0℃-45℃
Инсталација: земља
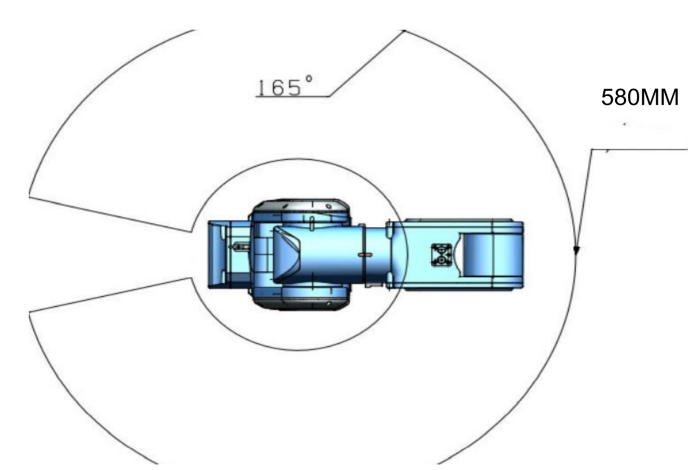
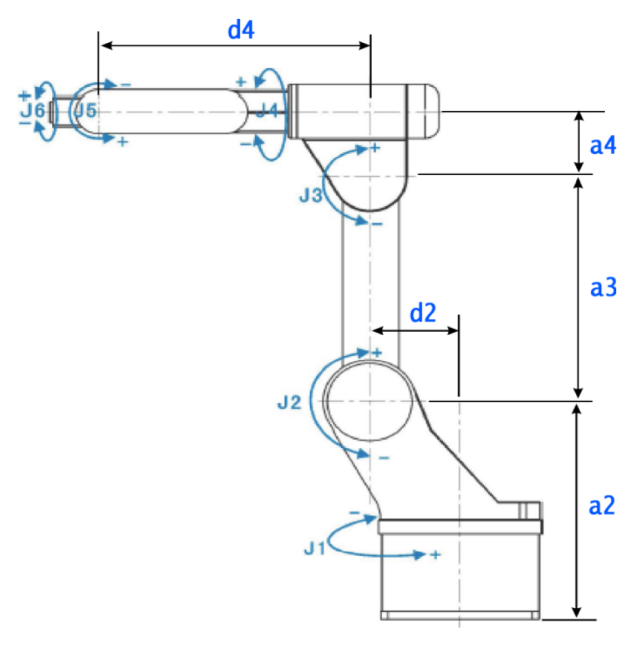
Радни опсег: Ј1:±165°
Ј2: -100°~+120°
Ј3:+150° ~-60°
Ј4:±175°
Ј5:+130° ~-30°
Ј6:±180°
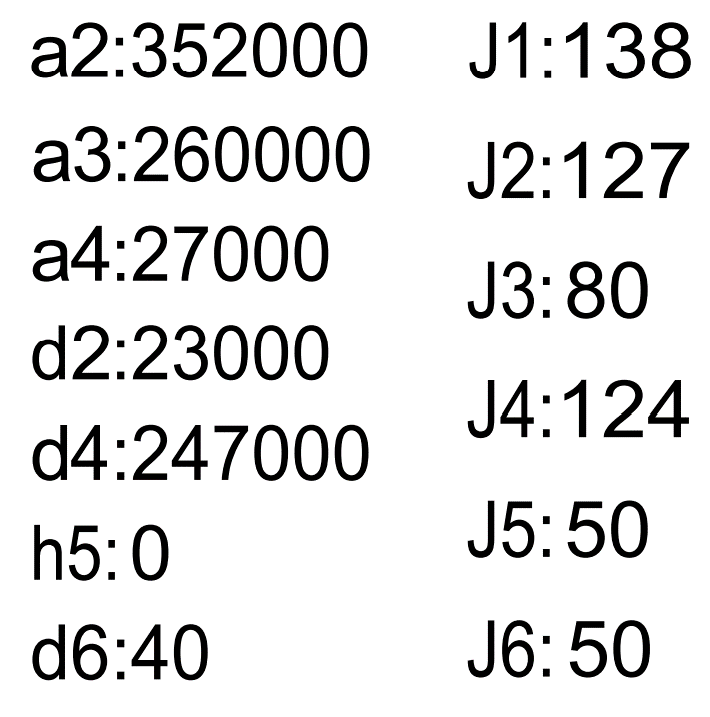
Максимална брзина: Ј1:260°/с
Ј2:250°/с
Ј3:250°/с
Ј4:250°/с
Ј5:200°/с
Ј6:760°/с
радни опсег:
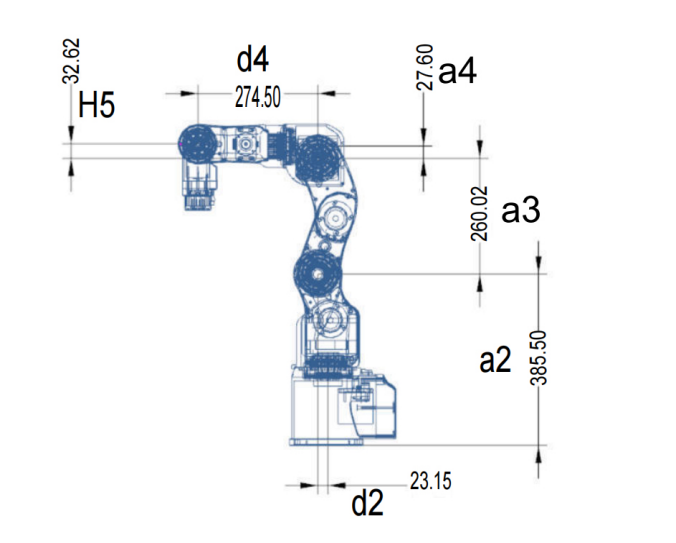
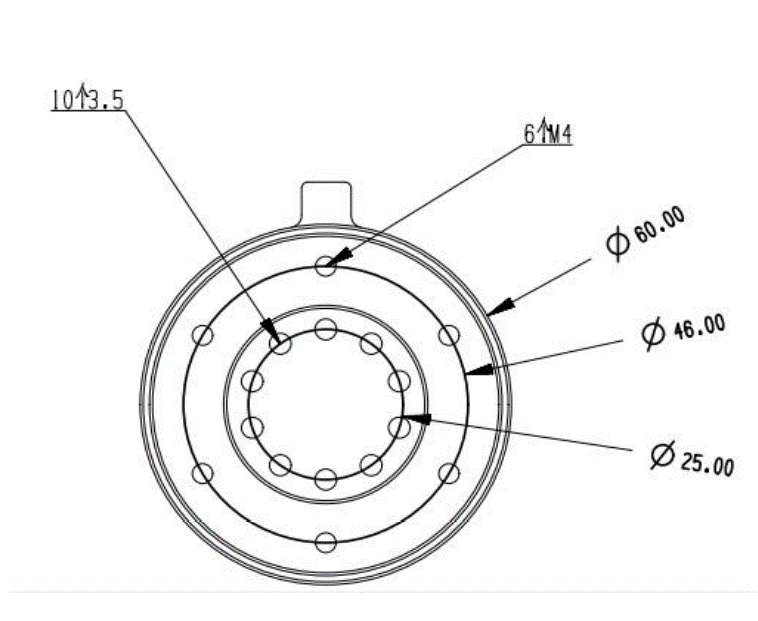
основна инсталација:
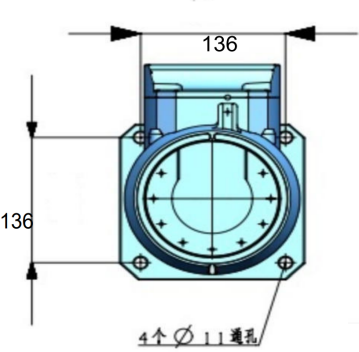
основна инсталација:
Апликације
Образовне апликације:
1. Проучити основни састав роботског система.
2. Проучити функције програмирања и подучавања роботског привеска за учење.
3. Проучити основна знања о офлајн програмирању робота.
4. Проучити рад и програмирање апликација робота ио.
5. Проучавати визуелне апликације робота
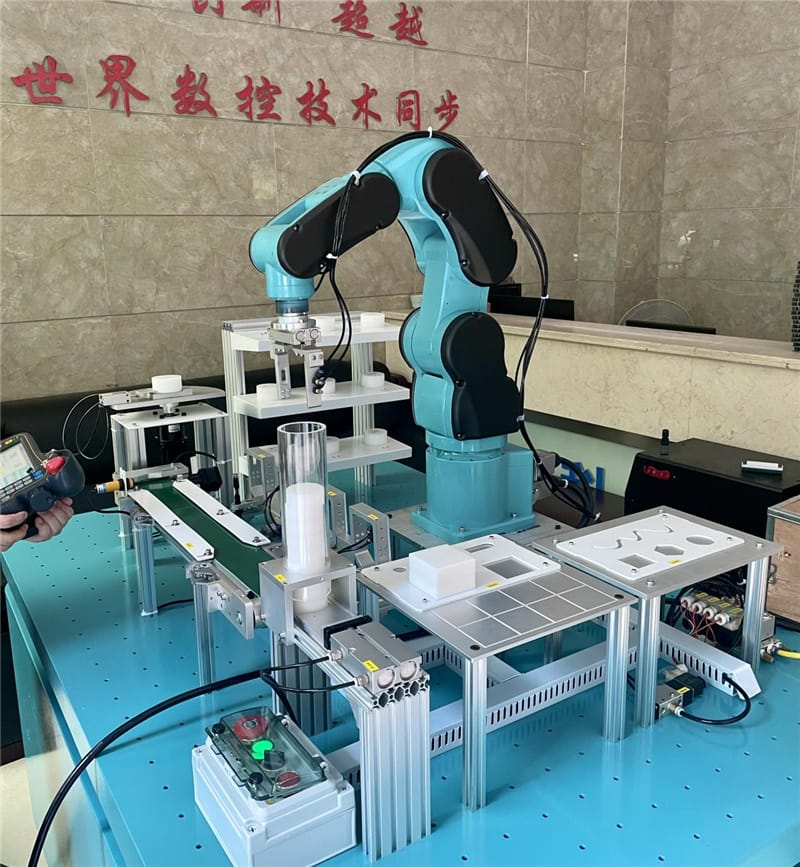
Комерцијалне сцене: Робот сладолед Робот Бармен Робот кафа Робот млеко чај Сцене лаке индустрије: Мерење Дозирање Инспекција Сортирање
Карактеристике производа
Роботска рука: Роботска рука је направљена од алуминијумских одливака кроз ЦНЦ обрадни центар, а површина је прскана пластиком и има прелеп изглед.
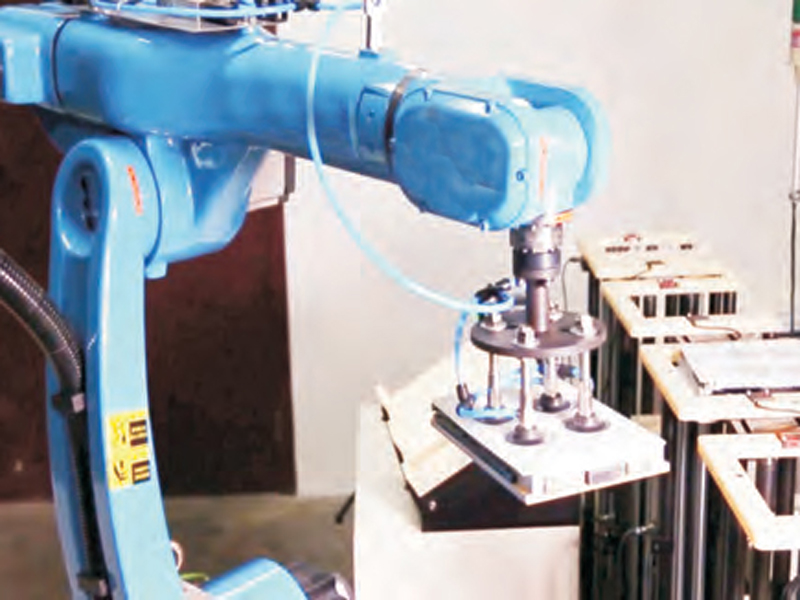
Резервисана рупа за кабл: Рука робота има резервисане рупе за каблове, које су лепе и не ометају рад манипулатора. Крај трахеје је резервисан за порт и конектор кабла за пренос података.
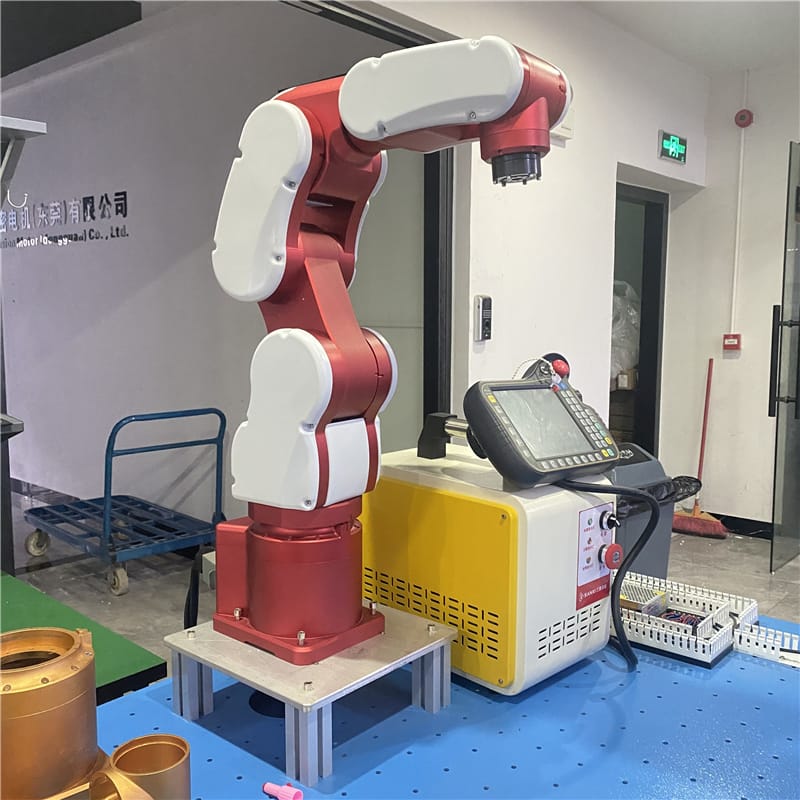
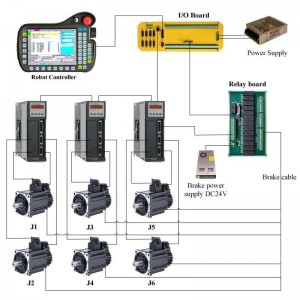
Контролна табла: ЛЦД екран са великим екраном, метода приказа језика може се заснивати на потребама корисника, једноставном и јасном раду и програмирању, са модификацијом параметара на мрежи и функцијама самодијагностике грешака.
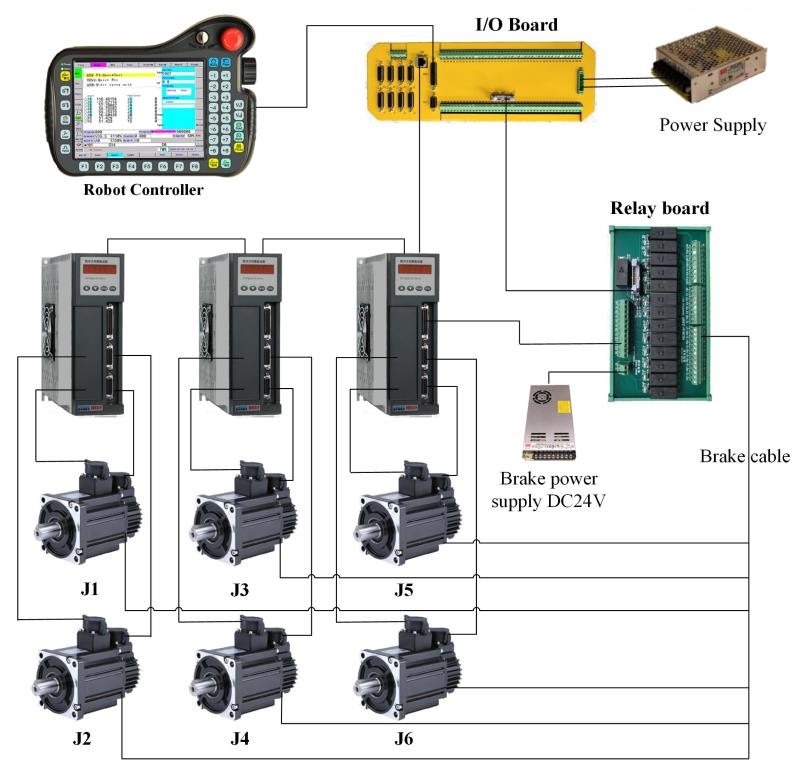
Контролни ормар за роботе: Интелигентни систем контроле кретања усваја индустријску компјутерску технологију, а потпуно дигитални серво модул обезбеђује погонску снагу за АЦ серво моторе сваког зглоба робота.
Роботска опрема: Алат може изабрати различиту гравитацију и количину према прилагођеним захтевима, а уграђен је на крајњу прирубницу, која се лако подешава и има широк спектар употребе.